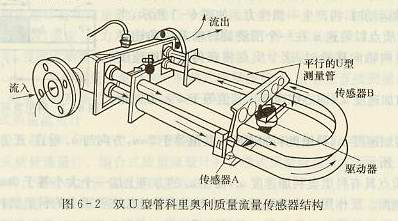
双U型结构原理
双U型是振动管式CMF中最早应用的一种结构,如图6-2所示。两根U型管(也可以是一跟)在驱动器的作用下绕主管轴以一定频率振动,被测流体流进主管道后进入U型管,流动方向与振动方向垂直,如图6-2所示。
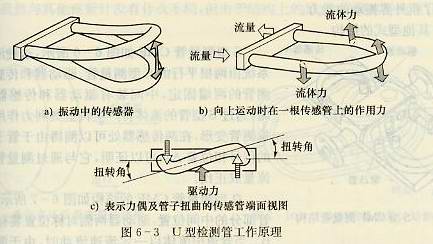
从上面的分析可以看出,当流速为零时,U型检测管只有上下振动而不受科里奥利力的作用,如图6-3a所示。形成了一对力矩T作用在U型管上,使U型管产生扭曲变形,如图6-3c所示。该U型管的弯曲半径为R,总长度为L,则由式6-3可知,U型检测管所受到的力矩T为
T=4RωqmL (6-4)
在该力矩的作用下,U型管产生扭转角为θ。由于θ角一般很小,故有:
式中,Ks,为U型管的扭转弹性模量,在微小变形中Ks,为一常数。
由式(6-4)和(6-5)得
qm=Ksθ/4RωL (6-6)
即质量流量与检测管扭转角θ成正比。在U型管两侧的振动中心设置传感器A和传感器B,及传感器A和B 检测到的信号将存在一相位差Δψ,在时间域内存在以时间差Δt,显然,这时间差Δt与扭转角θ成正比。因为检测管在振动中心位置时垂直方向的线速度为Lω,所以时间差Δt=2Rθ/Lω.结合式6-6可得:
qm=KsLωΔt/8R
2Lω=KsΔt/8R
2 (6-7)
由式6-7可以看出,只要测出两传感器A和B的信号时间差Δt(也就是相位差Δψ),就可以测得质量流量qm,而与流体的物性参数和测试条件无关。